

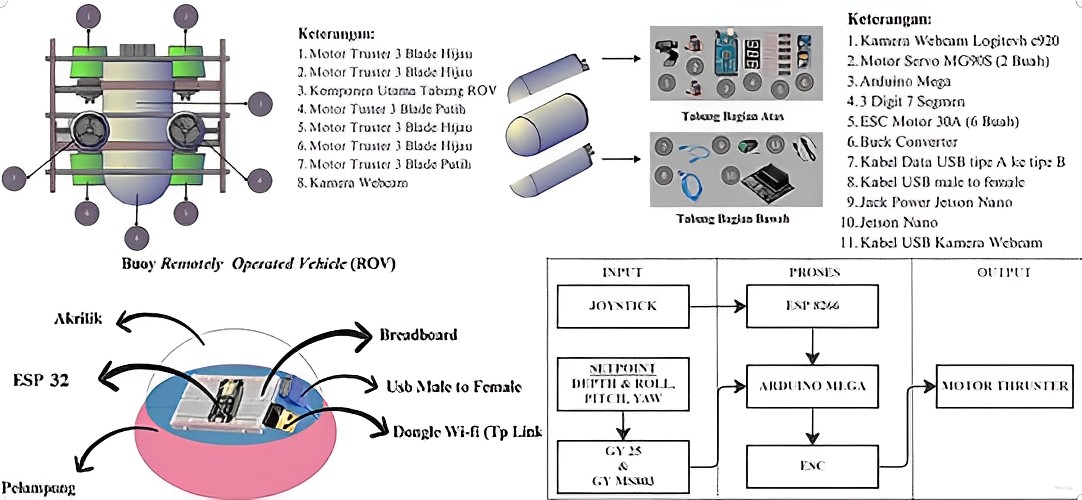
ROV (Remotely Operated Vehicle) merupakan robot bawah laut yang dikendalikan dari jarak jauh dengan operator yang berada pada kondisi wilayah yang aman. Namun pada saat dioperasikan ROV memiliki beberapa kendala antara lain ROV seringkali menubruk terumbu karang dikarenakan ROV turun ke dalam air terlalu jauh. Hal itu dikarenakan ROV dikendalikan oleh manusia dan ROV belum mampu untuk melakukan pengendalian kedalaman dan stabil sesuai dengan setpoint yang diinginkan. Oleh karena itu, salah satu solusi penanggulangan atas masalah tersebut dapat dilakukan dengan ditambahkan sensor GY-25 yaitu sensor gyroscope yang berfungsi sebagai sensor keseimbangan pada ROV, serta ditambahkan sensor GY-MS5803-14BA sebagai sensor pressure yang berperan sebagai pembacaan kedalaman air. Pada penelitian ini digunakan metode Hybrid Fuzzy-PID dengan feedback sensor GY-25 sebagai sensor pembacaan sudut kemiringan posisi robot dibawah air, serta sensor GY-MS5803-14BA sebagai sensor tekanan air yang dioptimalkan sebagai sistem pengukuran kedalaman air serta dapat mendeteksi perubahan suhu. Dimana metode Hybrid Fuzzy-PID yang diimplementasikan untuk ROV pada kontrol kedalaman dan keseimbangan untuk menggerakkan aktuator berupa 6 motor thruster. Hasil dari penelitian ini berupa Fuzzy yang dapat mengklasifikasikan kedalaman, serta PID yang dapat bergerak sesuai setpoint kedalaman yang telah ditentukan. PID untuk kontrol kedalaman diperoleh pada kedalaman 0 – 150 cm dengan waktu untuk kondisi steady yaitu kurang dari 0,066 detik.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}