Yuda Irawan
Abstrak
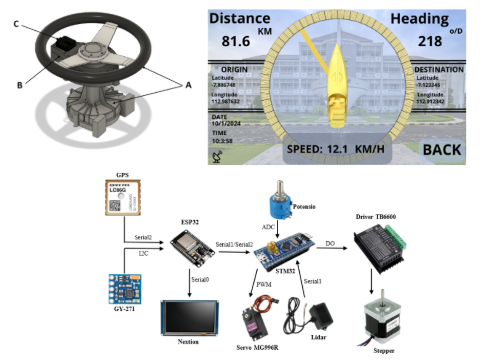
Penelitian ini bertujuan untuk mengembangkan modul Autopilot berbasis STM32 yang mampu mengarahkan kapal menuju titik tujuan tertentu dengan lebih fleksibel. Menggunakan sensor kompas, GPS, dan motor stepper, sistem ini mengintegrasikan metode PID untuk menjaga kestabilan arah kapal selama navigasi. Dengan fitur input manual koordinat tujuan, modul ini dapat diterapkan pada berbagai jenis kapal, memungkinkan navigasi yang lebih efisien dan presisi untuk mencapai lokasi yang diinginkan.